欢迎您来到雷竞技官网官方网站入口



发布时间:2024-01-08 10:52:49 | 作者: 雷竞技官网官方网站入口
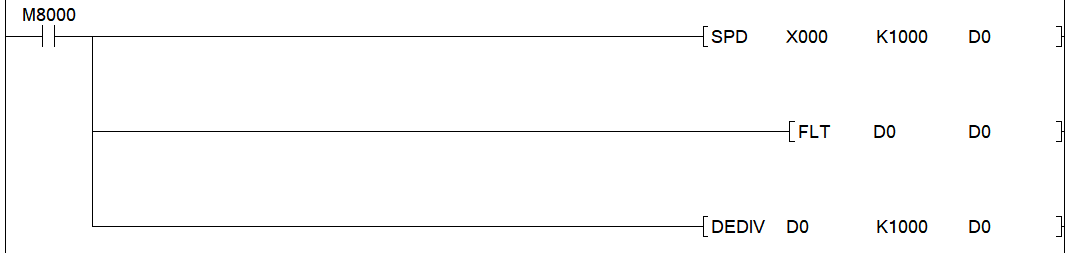
如何测量下面电机的速度(编码器的分辨率为400个脉冲每转)(单位:转/分钟)。
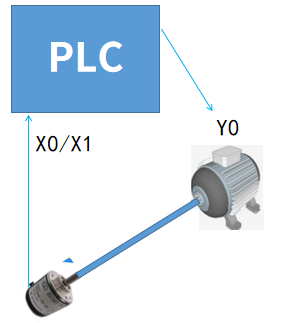
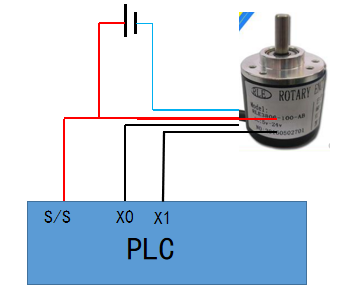
这个编码器属于NPN输出的,输出低电平,AB相输出接入到plc的X0和X1,plc的公共端接入24V。
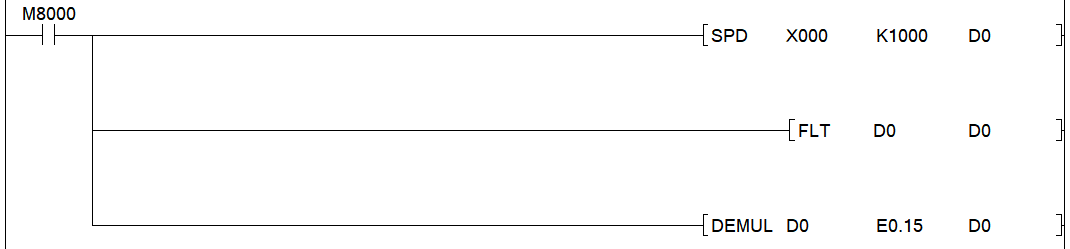
本案例只需要测量速度,没有测量距离的要求,因此能不用高速计数器,只需要用SPD指令(脉冲密度测量),第一个参数指定X0作为测量电,规定时间为1000ms,即1s,把每1s接收到的脉冲数读取到DO里。
通过FLT指令把D0的数据类型转换成浮点数,正常的转速度定位是转/分钟,把秒转换成分钟,要乘以60,编码器分辨率是400个脉冲每转,因此就需要除以400,因此D0的结果需要乘以60除以400,也就是乘以0.15,得到的结果才是正确的单位。
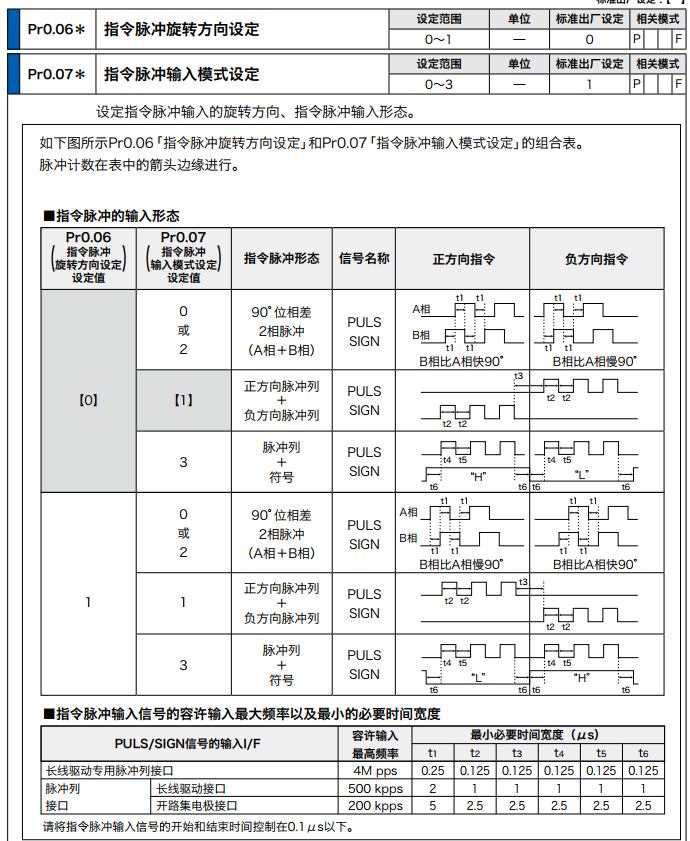
如下,编码器(分辨率400,输出低电平)接到伺服电机的脉冲输入口(伺服选择松下A5型号),要实现这个普通电机和伺服电机的同步,该怎么来实现电机和伺服同步。
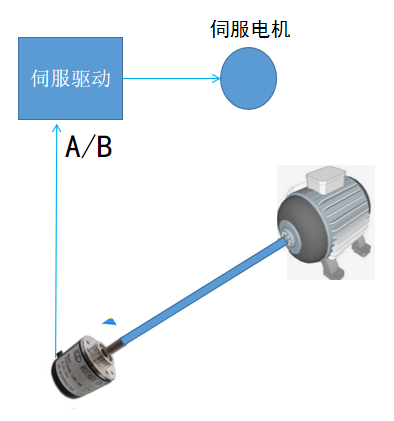
需要接入的信号有伺服使能、脉冲口A/B相,给电机驱动器7号和29号引脚一个24V,让电机上电就一直使能,编码器为NPN输出类型,给到伺服的信号为低电平信号,因此接到对于两个信号口的负端4号和6号引脚,信号的正端3号和5号直接接24V电源。
最后,因为编码器发生的脉冲是AB线的交替差分信号,伺服电机就要选择对应的输入模式,把PR0.07设置为0或者2
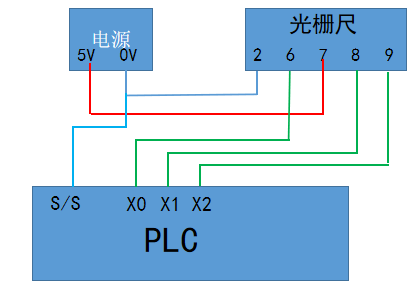
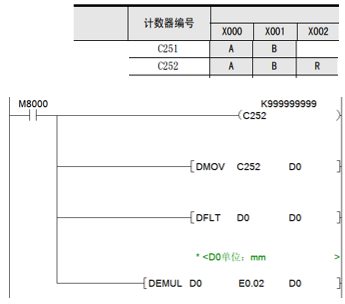
如下,有一个光栅尺,使用三菱FX3U的plc如何获取到光栅尺的位置信息,并且计算出实际距离。
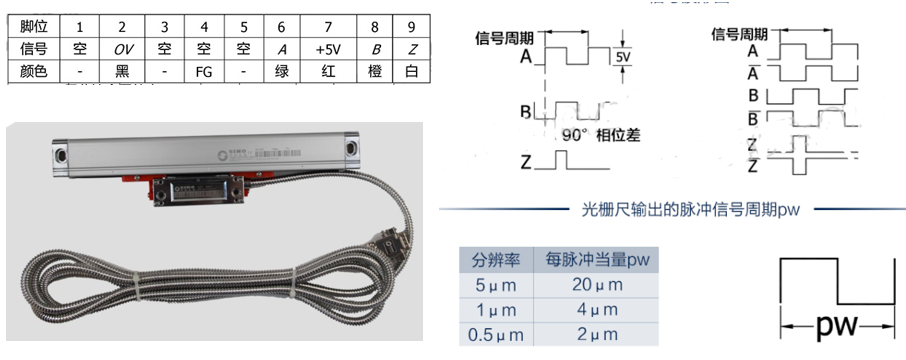
光栅尺输出的信号为高电平,把A、B、Z相信号接到X0、X1、X2这3个点,plc公共端接入负电源。

使用高速计数器C252,X0 、X1作为AB相记录脉冲位置,X2作为复位信号,这个是光栅尺里面特定的一个点,碰到了,就是自动复位C252,这个点作为原点。
据脉冲当量20um,也就是0.02mm,读取出来的脉冲数,需要用FLT指令转换成浮点数,去乘以脉冲当量,就得到实际的位置。
如下,有一个流量计,使用三菱FX3U的plc如何获取到流量计的流量速度(若需要或者流过液体的总体积,该如何计算)
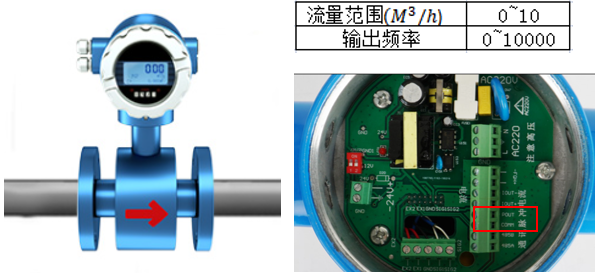
PLC公共端接入正24V,因此X点接收端的信号应为负,所以把负电压接入流量计负端,流量计正端信号接到X0即可。

下面程序能计算出对于的流量,使用SPD测量速指令测量出1s的脉冲数,1s的脉冲数也就是脉冲的频率,0~10000对应的是流量0~10,是1000倍的关系;因此,该数据需要去除以1000才得到真实的流速(单位

M8013每隔1s导通1次,做个加法累加一次,得到的就是总流量,上面求出的值的单位需要转换为秒,因此就需要除以3600s,得出的才是实际的流速,保存在D2,然后用加法指令去累加,得到的就是累计流量。另外设置了一个清空按钮X1,按下即可清空累计流量。

1.案例2中,如果要编码器自动6圈,伺服电机自动7圈,该怎么样设置才能更精准(提示:电子齿轮比)
微型直流电机在磁带录音机中使用较普遍,配套的电子稳速电路如附图所示。 R2、RP、R3、R5、R6组成分压式取样电路,RP是调速电位器,VT1是误差电压放大管。、VT2是调整管,R5、R6(并联)为限流电阻,L为高频扼流电感,C1是电源滤波电容,VD1、VD2、C2用来消除高频噪扰,保证调速电路稳定工作。VD3、VD4起补偿作用。误差电压取自电机M两端.当M两端电压升高,导致其电流增加、转速变快时,因R5、R6压降随之增加.使VT1基极电位上升。VT1集电极(即VT2基极)电流减小,VT2动态电阻增大,最终使电机M通过的电流变小,转速下降到接近正常水平,以此来实现环路稳速控制;反之亦然。 稳速电路最主要故障是稳速性能变差,使
上次说的LCD1602的编程挺复杂的,这次我说一个简单一点的:步进电机。 这里不说步进电机的 细分 实验,只说一下有关步进电机的基础概念以及步进电机的三种工作方式——单拍、双拍、单双拍,现在步进电机的编程一般都要用到专门的步进电机驱动芯片(如:L6219芯片),所以具体的编程下次再讲。先说一下相、线和极性。 一:线、相、极性 相 就是说明步进电机有几个线圈(也叫做绕组)。 线 就是说明步进电机有几个接线口。 极性 分为 单极性 和 双极性。如果步进电机的线圈是可以双向导电的,那么这个步进电机就是双极性的,相反,如果步进电机的线圈是只允许单向导电的,那么这个步进电机就是单极性的。 上面的三个只要知道其中两个,
相关知识 /
如何将 EtherNet/IP、EtherCAT 和 PROFINET添加到自动化工厂
如何以经济实惠的方式将 EtherNet/IP、EtherCAT 和 PROFINET添加到自动化工厂 还记得科幻电影中曾有一个场景显示由AI管理的全自动工厂吗?现在就有这样的工厂! 自主工厂依赖于各个组件(如运动控制器和机器人)之间的实时通信,而且这种通信必须实时进行。例如,100 英尺外的可编程逻辑控制器 (PLC) 向机器人发送的运动命令假如慢慢的出现延迟,则有几率会使最终产品出现缺陷。 基于以太网的实时通信协议的进步已经解决了这样的一个问题。这些协议使工厂内连接大型设备的网络能够实时相互通信,同时还提供足够的带宽将诊断和控制数据发送到云端。 但有一个问题;尽管有很多实时以太网协议为这种通信提供便利,但不同的协议不能
3.6 转速及电流检测 3.5.1 光电编码器测速原理 本文使用的电机轴上自带了增量式光电编码器HEDS5500-100,当码盘转动时,它的输出信号是相位差为90°的A相和B相脉冲号。从A,B两个输出信号的相位关系(超前或滞后)可判断旋转的方向。波形原理图如图3-10所示。 图3-10 光电编码器顺时针旋转时的输出波形 顺时针旋转时,A相超前B相90°。逆时针旋转时,B相超前A相90°。根据两相相位关系即可判断出电机的旋转方向。查阅该光电编码应用手册可知道,光电编码器轴旋转一周时,各相均输出100个脉冲,根据该特点,可在一段时间内对编码器输出脉冲进行计数,经计算便可得到转速。光电编码器与ATme
优化控制管理系统设计(四) /
步进电机减速机 减速机的作用 减速机的作用与电机的发展密切相关。最初,当交流电机是一种简单的旋转设备时,减速机主要用于改变电机速度和作为扭矩放大器。随着包含速度控制功能的电机的引入,减速机的主要作用是放大扭矩。 但随着步进电机被广泛接受以满足速度和位置控制的要求,减速机找到了新的用途,包括扭矩的放大、允许的惯量的改进和电机振动的减少。此外,与交流电机的传统齿轮箱不同,电机的精确定位能力产生了对高精度、无背隙齿轮箱的需求。 Oriental Motor 紧跟这些趋势,一直在开发具有最佳特性的特定齿轮箱,以保持所使用的电动机的特性。交流电机用减速机的设计重点是高容许扭矩、长寿命、低噪音和广泛的齿轮比,可作为动力源连续使用。
减速机的原理与结构 /
在电路设计当中, 全桥 的作用非常重要,当桥式整流电路当中的四个二极管封装在一起时就构成了全桥电路,而全桥电路实际上就是我们常说的H桥电路。本篇文章将主要介绍H桥电机驱动的工作原理,从逆时针和顺时针两个方面来进行全面的分析。 图1 H桥式电机驱动电路 图1中所示为一个典型的直流电机控制电路。电路得名于“H桥式驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图1及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来。 如上图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至
驱动电路的工作原理详解 /
1 前言 随着现代工业的高速发展,多电机交流控制系统已经被广泛地应用于造纸、化工、钢铁、食品等工业领域,而且形成了各自独特的变频器控制系统。在实际运行中,这样的控制系统具有可靠性强、抗干扰率高,但相应的维护费用却随着时日的推移而越来越高。比如,某类型的变频器采用其独特的通讯协议和通讯接口,一旦通讯故障所造成的通讯接口板烧毁将直接导致系统的崩溃,除非购买该型号的通讯接口;同样如果该变频器由于烧毁,亦需要购买同型号的变频器;另外,系统要升级换代,必须全面更换所有变频器。如此一来,采购费用巨大、备品库存积压等现象将不可避免地存在。 本文将引入一种基于现场总线的多电机交流控制系统,它结合了目前最主流的现场总线技术,并考虑了实际
1 引言 随着近年来传动系统的发展,多电机传动系统已经被广泛地应用于各种领域。为了提高多电机传动系统的动态性能和稳态性能,满足一些特定系统对多电机控制的同步要求,多电机协调同步控制方法的研究变得越来越重要。针对交流电机的数学模型是一个高阶、非线性、强耦合的多变量系统,以及矢量控制的不完全解耦性等缺点,本文引入了智能控制中的模糊控制技术,选用参数自调整模糊控制器,设计了一种基于模糊矢量控制的多电机同步控制方案从而提高系统的动态性能。方案中使用西门子变频器的矢量控制功能对交流电机进行变频调速,在西门子PLC中实现了参数自调整的模糊控制。并通过Matlab进行系统模块设计的仿线 多电机同步控制系统概述 在现代应用
设计(第2版) (陈世坤)
【电路】三菱牌MRE-2163W、2163WN、MRE-2163G、2163GN型电冰箱电路
ADI世健工业嘉年华——深度体验:ADI伺服电机控制方案
解锁【W5500-EVB-Pico】,探秘以太网底层,得捷电子Follow me第4期来袭!
随着科技的快速的提升,汽车工业正迈入一个全新的时代。在这个时代里,无人驾驶汽车已不再是遥不可及的梦想,而是正在慢慢地变为现实。随之而 ...
汽车充电桩是电动汽车外围最主要的设备,为电动汽车提供源源不断的电力。根据供电方法不一样,可分为交流充电桩和直流充电桩。汽车充电桩产品 ...
丰田第二代混合动力系统(THS-Ⅱ),机械构造之精妙,控制策略之严谨,可谓独步全球,其核心竞争力就在于动力分配行星齿轮机构Power S ...
电动车辆供电设备在1级和2级额定电压下为电动汽车电池充电。电动汽车(EV)车主依靠电动汽车供电设备(EVSE)为电池高效充电。EVSE通常被称 ...
Cybertruck的EPA文件提供了关于它电池包的一些基本信息参数信息。电池电压,电池容量为150Ah,总电量(816V*150Ah)约为122 4kWh,单位体积内的包含的能量约为 ...

站点相关:嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科